امروزه حضور رباتها در گستره وسیعی از زندگی انسانها مشهود می باشد. از این دست می توان به رباتهای صنعتی، رباتهای متحرک، رباتهای بازرس، رباتهای توانبخشی و ... اشاره نمود.
شرایط به گونه ای پیش رفته که دربسیاری از چالشهای صنعتی، رویکردهای رباتیک و هوش مصنوعی جایگزین نیروی انسانی گردیده اند.
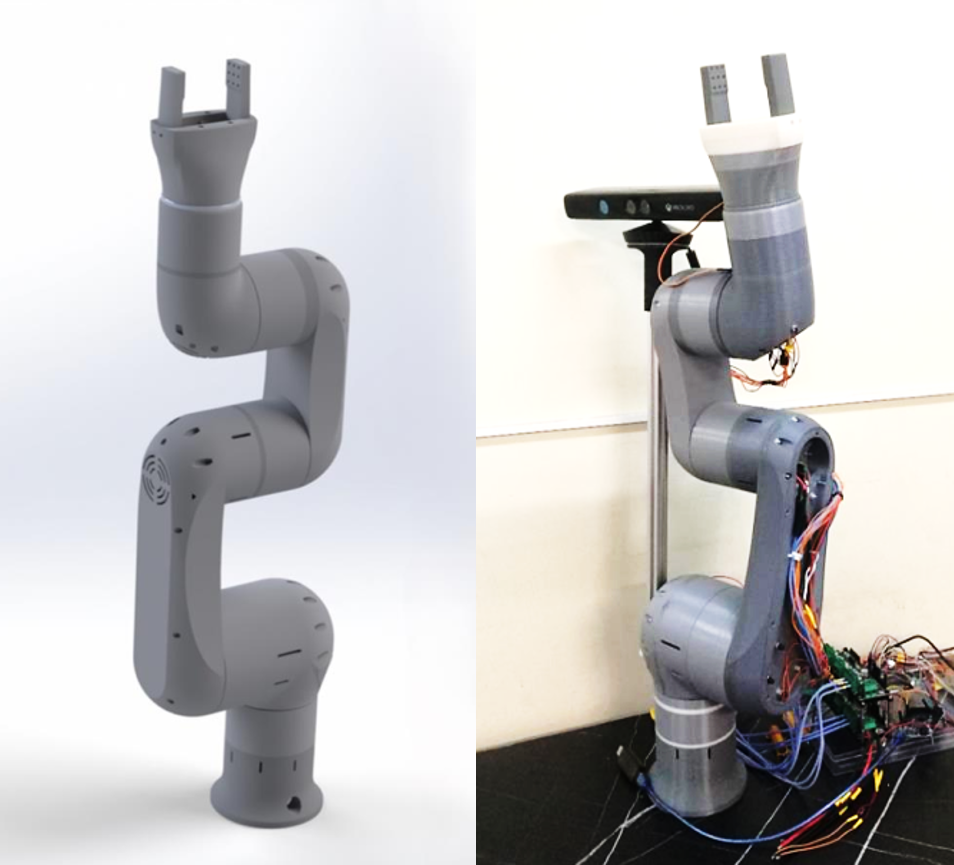
طراحی و ساخت بازوی مکانیکی
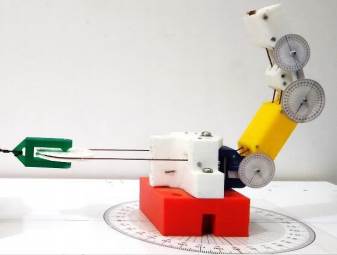
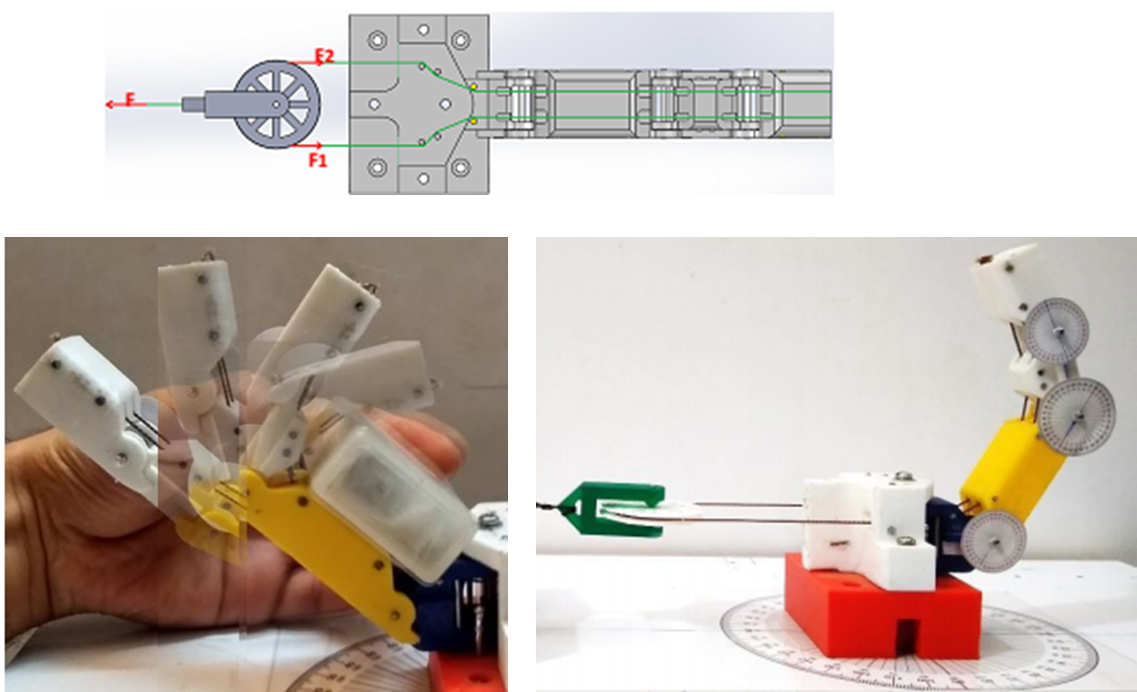
انگشت رباتیک با مکانیزم دیفرانسیلی
ربات متحرک با قابلیت انعطاف ساختار جهت عبور از فضاهای مختلف
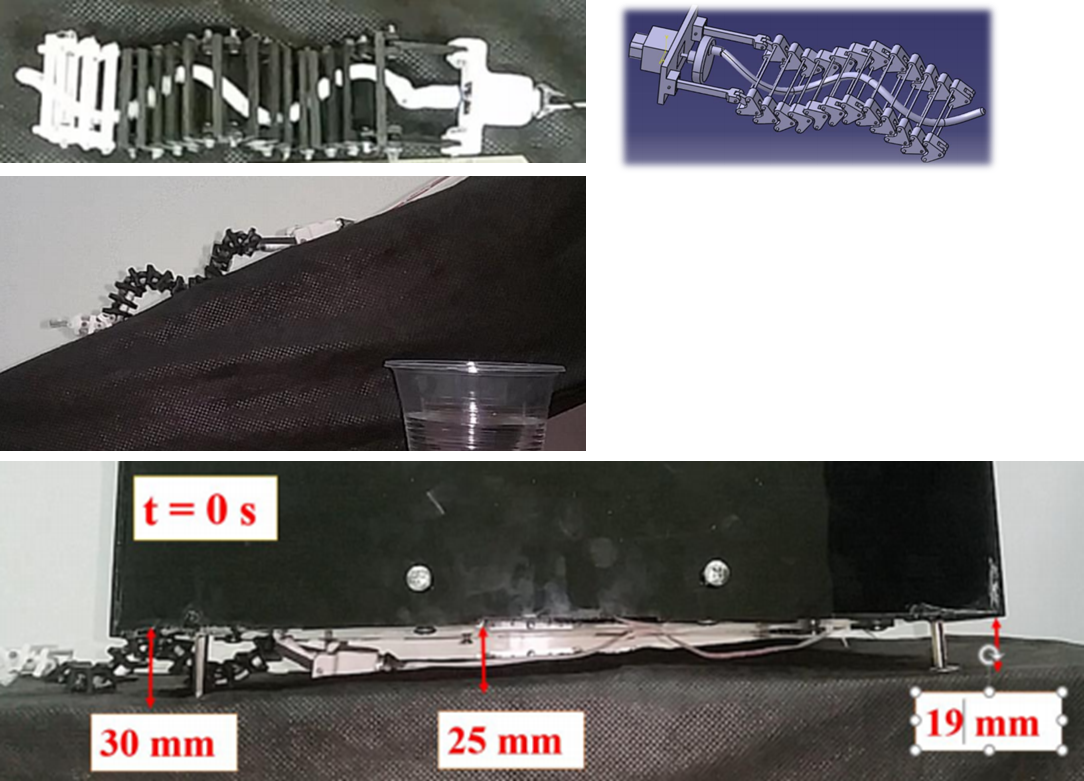
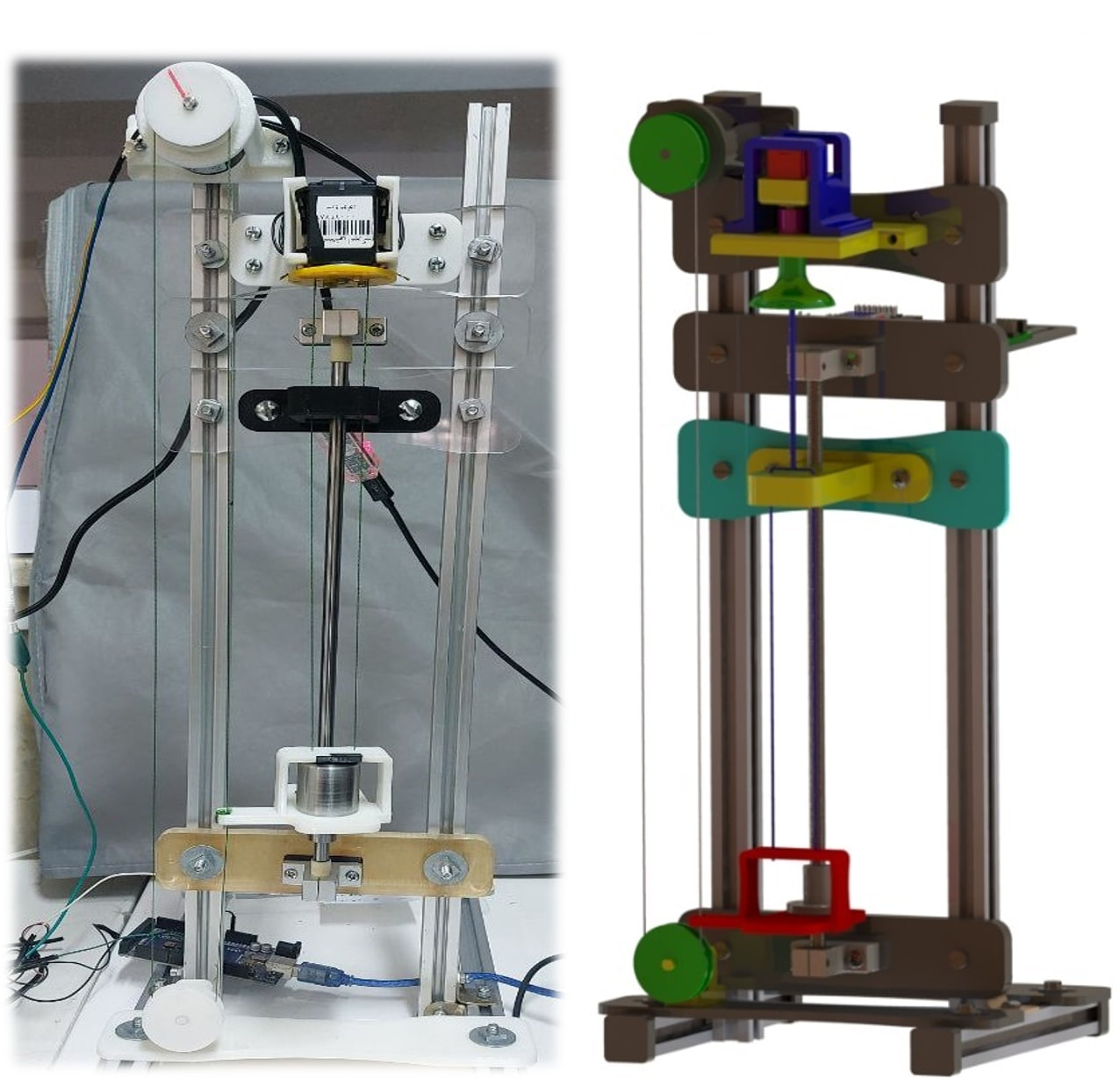
عملگرهای ریسمان تابیده شده